@ZvikaF wrote:
Finally i have the heli pitch,roll and yaw functioning correct without fluctuation and prompt response.
Now i’m doing the ALT HOLD and POS HOLD tuning …
seems that the altitude command is rapidly drifting up and i have to compensate by taking down the command yill i have to disengage the mode and go back to stabilized which is a bit cranky, as i have to flip quick up the collective command.I found no process notification on the tuning document, is there one ?
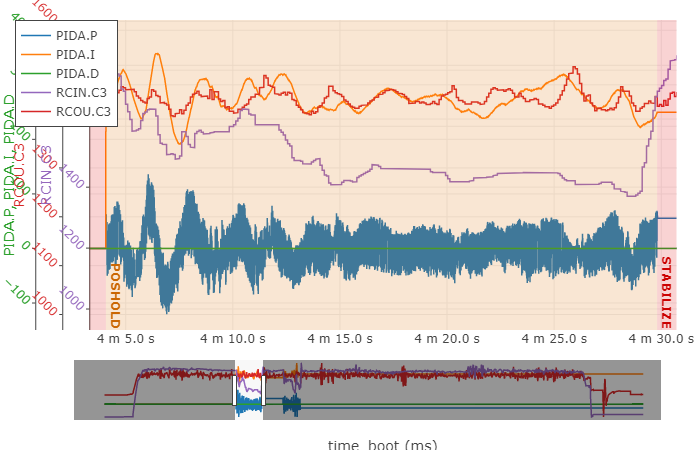
following is the graph that shows the collective (c3) command and servo behavior
And here is the data on the PID the altitude target is getting up ??


Posts: 7
Participants: 2