@moluav wrote:
i am tunning a tandem helicopter.Now it is good to fly in the stabilize mode. The roll and pitch flight is also good in the alihod mode and loiter mode, but the problem of yaw adjustment.
in althold mode and loiter mode,When using the joystick to adjust the yaw, the pitch of the drone will shake up and down.
here is some pic of my log.
These two pictures show that my aircraft follows the pitch and roll attitudes. The pitch feels okay to follow, and the roll following effect does not feel very good.I think this may have something to do with the adjustment of my VFF parameters. Roll RATE.RDES is smaller than RATE.R. I think the VFF of the ROLL axis should be reduced. There is no adjustment yet.
The above picture shows the change of PITCH and ROLL when the aircraft is hovering in loiter mode. It seems that the change of one or two degrees has been adjusted. I don’t know if this is normal.
The picture above shows the curve of the yaw adjustment when the aircraft is in the loiter.
This picture can show that when using the joystick to adjust the row direction, the pitch is shaking up and down.
The way to adjust the yaw is. Swipe left or right and return to center.This can be seen from the light green curve of the figure.
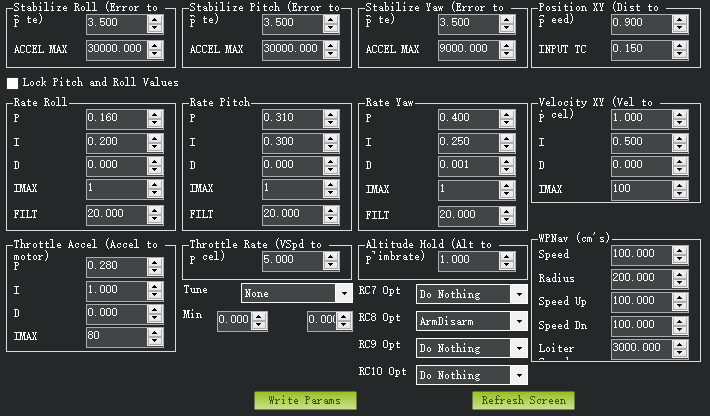
The picture above is related parameters.can anybody give me some tunning points?
Thanks in advance .






Posts: 3
Participants: 2